So far we have seen two concentration bounds for scalar random variables: Markov and Chernoff. For our sort of applications, these are by far the most useful. In most introductory probability courses, you are likely to see another inequality, which is Chebyshev’s inequality. Its strength lies between the Markov and Chernoff inequalities: the concentration bounds we get from Chebyshev is usually better than Markov but worse than Chernoff. On the other hand, Chebyshev requires stronger hypotheses than Markov but weaker hypotheses than Chernoff.
1. Variance
We begin by reviewing variance, and other related notions, which should be familiar from an introductory probability course. The variance of a random variable  is
is
![\displaystyle \begin{array}{rcl} {\mathrm{Var}}[X] ~=~ {\mathrm E}\Big[ \big(X-{\mathrm E}[X]\big)^2 \Big] ~=~ {\mathrm E}[ X^2 ] - {\mathrm E}[X]^2. \end{array}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Barray%7D%7Brcl%7D+%7B%5Cmathrm%7BVar%7D%7D%5BX%5D+%7E%3D%7E+%7B%5Cmathrm+E%7D%5CBig%5B+%5Cbig%28X-%7B%5Cmathrm+E%7D%5BX%5D%5Cbig%29%5E2+%5CBig%5D+%7E%3D%7E+%7B%5Cmathrm+E%7D%5B+X%5E2+%5D+-+%7B%5Cmathrm+E%7D%5BX%5D%5E2.+%5Cend%7Barray%7D+&bg=ffffff&fg=000000&s=0&c=20201002)
The covariance between two random variables and  is
is
![\displaystyle {\mathrm{Cov}}[X,Y] ~=~ {\mathrm E}\Big[ \big(X-{\mathrm E}[X]\big) \big(Y-{\mathrm E}[Y]\big) \Big] ~=~ {\mathrm E}[XY] - {\mathrm E}[X]{\mathrm E}[Y].](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BCov%7D%7D%5BX%2CY%5D+%7E%3D%7E+%7B%5Cmathrm+E%7D%5CBig%5B+%5Cbig%28X-%7B%5Cmathrm+E%7D%5BX%5D%5Cbig%29+%5Cbig%28Y-%7B%5Cmathrm+E%7D%5BY%5D%5Cbig%29+%5CBig%5D+%7E%3D%7E+%7B%5Cmathrm+E%7D%5BXY%5D+-+%7B%5Cmathrm+E%7D%5BX%5D%7B%5Cmathrm+E%7D%5BY%5D.+&bg=ffffff&fg=000000&s=0&c=20201002)
This gives some measure of the correlation between and .
Here are some properties of variance and covariance that follow from the definitions by simple calculations.
Claim 1 If and are independent then ![{{\mathrm{Cov}}[X,Y] = 0}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathrm%7BCov%7D%7D%5BX%2CY%5D+%3D+0%7D&bg=ffffff&fg=000000&s=0&c=20201002) .
.
Claim 2 ![{{\mathrm{Cov}}[X+Y,Z] = {\mathrm{Cov}}[X,Z] + {\mathrm{Cov}}[Y,Z]}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathrm%7BCov%7D%7D%5BX%2BY%2CZ%5D+%3D+%7B%5Cmathrm%7BCov%7D%7D%5BX%2CZ%5D+%2B+%7B%5Cmathrm%7BCov%7D%7D%5BY%2CZ%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) .
.
More generally, induction shows
Claim 3 ![{{\mathrm{Cov}}[\sum_i X_i,Z] = \sum_i {\mathrm{Cov}}[X_i,Z]}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathrm%7BCov%7D%7D%5B%5Csum_i+X_i%2CZ%5D+%3D+%5Csum_i+%7B%5Cmathrm%7BCov%7D%7D%5BX_i%2CZ%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) .
.
Claim 4 ![{{\mathrm{Var}}[X+Y] = {\mathrm{Var}}[X] + {\mathrm{Var}}[Y] + 2 \cdot {\mathrm{Cov}}[X,Y]}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathrm%7BVar%7D%7D%5BX%2BY%5D+%3D+%7B%5Cmathrm%7BVar%7D%7D%5BX%5D+%2B+%7B%5Cmathrm%7BVar%7D%7D%5BY%5D+%2B+2+%5Ccdot+%7B%5Cmathrm%7BCov%7D%7D%5BX%2CY%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) .
.
More generally, induction shows
Claim 5 Let  be arbitrary random variables. Then
be arbitrary random variables. Then
![\displaystyle {\mathrm{Var}}\Bigg[\sum_{i=1}^n X_i\Bigg] ~=~ \sum_{i=1}^n {\mathrm{Var}}[X_i] + 2 \sum_{i=1}^n \sum_{j>i} {\mathrm{Cov}}[X_i,X_j].](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BVar%7D%7D%5CBigg%5B%5Csum_%7Bi%3D1%7D%5En+X_i%5CBigg%5D+%7E%3D%7E+%5Csum_%7Bi%3D1%7D%5En+%7B%5Cmathrm%7BVar%7D%7D%5BX_i%5D+%2B+2+%5Csum_%7Bi%3D1%7D%5En+%5Csum_%7Bj%3Ei%7D+%7B%5Cmathrm%7BCov%7D%7D%5BX_i%2CX_j%5D.+&bg=ffffff&fg=000000&s=0&c=20201002)
In particular,
Claim 6 Let be mutually independent random variables. Then ![{ {\mathrm{Var}}[\sum_{i=1}^n X_i]~= \sum_{i=1}^n {\mathrm{Var}}[X_i] }](https://s0.wp.com/latex.php?latex=%7B+%7B%5Cmathrm%7BVar%7D%7D%5B%5Csum_%7Bi%3D1%7D%5En+X_i%5D%7E%3D+%5Csum_%7Bi%3D1%7D%5En+%7B%5Cmathrm%7BVar%7D%7D%5BX_i%5D+%7D&bg=ffffff&fg=000000&s=0&c=20201002) .
.
2. Chebyshev’s Inequality
Chebyshev’s inequality you’ve also presumably seen before. It is a 1-line consequence of Markov’s inequality.
Theorem 7 For any  ,
,
![\displaystyle {\mathrm{Pr}}\Big[ \big|X-{\mathrm E}[X]\big|\geq t \Big] ~\leq~ \frac{{\mathrm{Var}}[X]}{t^2}.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5CBig%5B+%5Cbig%7CX-%7B%5Cmathrm+E%7D%5BX%5D%5Cbig%7C%5Cgeq+t+%5CBig%5D+%7E%5Cleq%7E+%5Cfrac%7B%7B%5Cmathrm%7BVar%7D%7D%5BX%5D%7D%7Bt%5E2%7D.+&bg=ffffff&fg=000000&s=0&c=20201002)
Proof:
![\displaystyle {\mathrm{Pr}}\Big[ \big|X-{\mathrm E}[X]\big|\geq t \Big] ~=~ {\mathrm{Pr}}\Big[ \big(X-{\mathrm E}[X]\big)^2\geq t^2 \Big] ~\leq~ \frac{ {\mathrm E}[ \big(X-{\mathrm E}[X]\big)^2 ]}{t^2} ~=~ \frac{ {\mathrm{Var}}[ X ]}{t^2},](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5CBig%5B+%5Cbig%7CX-%7B%5Cmathrm+E%7D%5BX%5D%5Cbig%7C%5Cgeq+t+%5CBig%5D+%7E%3D%7E+%7B%5Cmathrm%7BPr%7D%7D%5CBig%5B+%5Cbig%28X-%7B%5Cmathrm+E%7D%5BX%5D%5Cbig%29%5E2%5Cgeq+t%5E2+%5CBig%5D+%7E%5Cleq%7E+%5Cfrac%7B+%7B%5Cmathrm+E%7D%5B+%5Cbig%28X-%7B%5Cmathrm+E%7D%5BX%5D%5Cbig%29%5E2+%5D%7D%7Bt%5E2%7D+%7E%3D%7E+%5Cfrac%7B+%7B%5Cmathrm%7BVar%7D%7D%5B+X+%5D%7D%7Bt%5E2%7D%2C+&bg=ffffff&fg=000000&s=0&c=20201002)
where the inequality is by Markov’s inequality. 
As a quick example, suppose we independently flip  fair coins. What’s the probability that we see at least
fair coins. What’s the probability that we see at least  heads? Let
heads? Let  be the indictator random variable of the event “
be the indictator random variable of the event “ th toss is heads”. Let
th toss is heads”. Let ![{\mu = {\mathrm E}[\sum_i X_i] = n/2}](https://s0.wp.com/latex.php?latex=%7B%5Cmu+%3D+%7B%5Cmathrm+E%7D%5B%5Csum_i+X_i%5D+%3D+n%2F2%7D&bg=ffffff&fg=000000&s=0&c=20201002) . So we want to analyze
. So we want to analyze ![{{\mathrm{Pr}}[ \sum_i X_i - \mu \geq n/4 ]}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathrm%7BPr%7D%7D%5B+%5Csum_i+X_i+-+%5Cmu+%5Cgeq+n%2F4+%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) .
.
Bound from Chebyshev: Note that
![\displaystyle {\mathrm{Var}}[X_i] ~=~ {\mathrm E}[X_i^2] - {\mathrm E}[X_i]^2 ~=~ 1/2 - 1/4 ~=~ 1/4.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BVar%7D%7D%5BX_i%5D+%7E%3D%7E+%7B%5Cmathrm+E%7D%5BX_i%5E2%5D+-+%7B%5Cmathrm+E%7D%5BX_i%5D%5E2+%7E%3D%7E+1%2F2+-+1%2F4+%7E%3D%7E+1%2F4.+&bg=ffffff&fg=000000&s=0&c=20201002)
By independence,
![\displaystyle {\mathrm{Var}}[{\textstyle \sum_i X_i}] ~=~ \sum_i {\mathrm{Var}}[X_i] ~=~ n/4.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BVar%7D%7D%5B%7B%5Ctextstyle+%5Csum_i+X_i%7D%5D+%7E%3D%7E+%5Csum_i+%7B%5Cmathrm%7BVar%7D%7D%5BX_i%5D+%7E%3D%7E+n%2F4.+&bg=ffffff&fg=000000&s=0&c=20201002)
By Chebyshev’s inequality
![\displaystyle {\mathrm{Pr}}[ {\textstyle \sum_i X_i - \mu \geq n/4 }] ~\leq~ {\mathrm{Pr}}\Big[ {\textstyle \big|\sum_i X_i-{\mathrm E}[\sum_i X_i]\big|\geq n/4 } \Big] ~\leq~ \frac{{\mathrm{Var}}[\sum_i X_i]}{(n/4)^2} ~=~ \frac{n/4}{(n/4)^2} ~=~ \frac{4}{n}.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5B+%7B%5Ctextstyle+%5Csum_i+X_i+-+%5Cmu+%5Cgeq+n%2F4+%7D%5D+%7E%5Cleq%7E+%7B%5Cmathrm%7BPr%7D%7D%5CBig%5B+%7B%5Ctextstyle+%5Cbig%7C%5Csum_i+X_i-%7B%5Cmathrm+E%7D%5B%5Csum_i+X_i%5D%5Cbig%7C%5Cgeq+n%2F4+%7D+%5CBig%5D+%7E%5Cleq%7E+%5Cfrac%7B%7B%5Cmathrm%7BVar%7D%7D%5B%5Csum_i+X_i%5D%7D%7B%28n%2F4%29%5E2%7D+%7E%3D%7E+%5Cfrac%7Bn%2F4%7D%7B%28n%2F4%29%5E2%7D+%7E%3D%7E+%5Cfrac%7B4%7D%7Bn%7D.+&bg=ffffff&fg=000000&s=0&c=20201002)
Bound from Chernoff: Chernoff’s inequality gives
![\displaystyle {\mathrm{Pr}}[ {\textstyle \sum_i X_i - \mu \geq n/4 }] ~=~ {\mathrm{Pr}}[ {\textstyle \sum_i X_i - \mu \geq \mu/2 }] ~\leq~ \exp( - (1/2)^2 \mu / 3 ) ~<~ 0.96^n.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5B+%7B%5Ctextstyle+%5Csum_i+X_i+-+%5Cmu+%5Cgeq+n%2F4+%7D%5D+%7E%3D%7E+%7B%5Cmathrm%7BPr%7D%7D%5B+%7B%5Ctextstyle+%5Csum_i+X_i+-+%5Cmu+%5Cgeq+%5Cmu%2F2+%7D%5D+%7E%5Cleq%7E+%5Cexp%28+-+%281%2F2%29%5E2+%5Cmu+%2F+3+%29+%7E%3C%7E+0.96%5En.+&bg=ffffff&fg=000000&s=0&c=20201002)
This is better than the bound from Chebyshev for  .
.
So Chebyshev is weaker than Chernoff, at least for analyzing sums of independent Bernoulli trials. So why do we bother studying Chebyshev? One reason is that Chernoff is designed for analyzing sums of mutually independent random variables. That is quite a strong assumption. In some scenarios, our random variables are not mutually independent, or perhaps we deliberately choose them not to be mutually independent.
- For example, generating mutually independent random variables requires a lot of random bits and, as discussed last time, randomness is a “precious resource”. We will see that decreasing the number of random bits give another method to derandomize algorithms.
- Another important example is in constructing hash functions, which are random-like functions. Generating a completely random function takes a huge number of random bits. So instead we often try to use hash functions involving less randomness.
3.  -wise independence
-wise independence
A set of events  are called -wise independent if for any set
are called -wise independent if for any set  with
with  we have
we have
![\displaystyle {\mathrm{Pr}}[ \wedge_{i \in I} {\mathcal E}_i ] ~=~ \prod_{i \in I} {\mathrm{Pr}}[ {\mathcal E}_i ].](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5B+%5Cwedge_%7Bi+%5Cin+I%7D+%7B%5Cmathcal+E%7D_i+%5D+%7E%3D%7E+%5Cprod_%7Bi+%5Cin+I%7D+%7B%5Cmathrm%7BPr%7D%7D%5B+%7B%5Cmathcal+E%7D_i+%5D.+&bg=ffffff&fg=000000&s=0&c=20201002)
The term pairwise independence is a synonym for  -wise independence.
-wise independence.
Similarly, a set of discrete random variables are called -wise independent if for any set with and any values  we have
we have
![\displaystyle {\mathrm{Pr}}[~ \wedge_{i \in I} \: X_i \!=\! x_i ~] = \prod_{i \in I} {\mathrm{Pr}}[ X_i = x_i ].](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5B%7E+%5Cwedge_%7Bi+%5Cin+I%7D+%5C%3A+X_i+%5C%21%3D%5C%21+x_i+%7E%5D+%3D+%5Cprod_%7Bi+%5Cin+I%7D+%7B%5Cmathrm%7BPr%7D%7D%5B+X_i+%3D+x_i+%5D.+&bg=ffffff&fg=000000&s=0&c=20201002)
Claim 8 Suppose are -wise independent. Then
![\displaystyle {\mathrm E}[~{\textstyle \prod_{i \in I} X_i }~] ~=~ \prod_{i \in I} {\mathrm E}[X_i] \qquad\forall I ~\mathrm{with}~ |I| \leq k.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm+E%7D%5B%7E%7B%5Ctextstyle+%5Cprod_%7Bi+%5Cin+I%7D+X_i+%7D%7E%5D+%7E%3D%7E+%5Cprod_%7Bi+%5Cin+I%7D+%7B%5Cmathrm+E%7D%5BX_i%5D+%5Cqquad%5Cforall+I+%7E%5Cmathrm%7Bwith%7D%7E+%7CI%7C+%5Cleq+k.+&bg=ffffff&fg=000000&s=0&c=20201002)
Proof: For notational simplicity, consider the case  . Then
. Then
![\displaystyle \begin{array}{rcl} {\mathrm E}[~{\textstyle \prod_{i=1}^k X_i }~] &=& \sum_{x_1} \sum_{x_2} \cdots \sum_{x_k} ~ {\mathrm{Pr}}[~ \wedge_{i=1}^k \, X_i \!=\! x_i ~] \cdot \prod_{i=1}^k x_i \\ &=& \sum_{x_1} \sum_{x_2} \cdots \sum_{x_k} ~ \prod_{i=1}^k {\mathrm{Pr}}[X_i \!=\! x_i ] \cdot x_i \qquad(k\!-\!\mathrm{wise~independence})\\ &=& \Big(\sum_{x_1} {\mathrm{Pr}}[X_1 \!=\! x_1 ] \cdot x_1\Big) \cdots \Big(\sum_{x_k} {\mathrm{Pr}}[X_k \!=\! x_k ] \cdot x_k\Big) \\ &=& \prod_{i=1}^k {\mathrm E}[ X_i ]. \end{array}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Barray%7D%7Brcl%7D+%7B%5Cmathrm+E%7D%5B%7E%7B%5Ctextstyle+%5Cprod_%7Bi%3D1%7D%5Ek+X_i+%7D%7E%5D+%26%3D%26+%5Csum_%7Bx_1%7D+%5Csum_%7Bx_2%7D+%5Ccdots+%5Csum_%7Bx_k%7D+%7E+%7B%5Cmathrm%7BPr%7D%7D%5B%7E+%5Cwedge_%7Bi%3D1%7D%5Ek+%5C%2C+X_i+%5C%21%3D%5C%21+x_i+%7E%5D+%5Ccdot+%5Cprod_%7Bi%3D1%7D%5Ek+x_i+%5C%5C+%26%3D%26+%5Csum_%7Bx_1%7D+%5Csum_%7Bx_2%7D+%5Ccdots+%5Csum_%7Bx_k%7D+%7E+%5Cprod_%7Bi%3D1%7D%5Ek+%7B%5Cmathrm%7BPr%7D%7D%5BX_i+%5C%21%3D%5C%21+x_i+%5D+%5Ccdot+x_i+%5Cqquad%28k%5C%21-%5C%21%5Cmathrm%7Bwise%7Eindependence%7D%29%5C%5C+%26%3D%26+%5CBig%28%5Csum_%7Bx_1%7D+%7B%5Cmathrm%7BPr%7D%7D%5BX_1+%5C%21%3D%5C%21+x_1+%5D+%5Ccdot+x_1%5CBig%29+%5Ccdots+%5CBig%28%5Csum_%7Bx_k%7D+%7B%5Cmathrm%7BPr%7D%7D%5BX_k+%5C%21%3D%5C%21+x_k+%5D+%5Ccdot+x_k%5CBig%29+%5C%5C+%26%3D%26+%5Cprod_%7Bi%3D1%7D%5Ek+%7B%5Cmathrm+E%7D%5B+X_i+%5D.+%5Cend%7Barray%7D+&bg=ffffff&fg=000000&s=0&c=20201002)
Example: To get a feel for pairwise independence, consider the following three Bernoulli random variables that are pairwise independent but not mutually independent. There are 4 possible outcomes of these three random variables. Each of these outcomes has probability  .
.
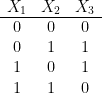
They are certainly not mutually independent because the event  has probability
has probability  , whereas
, whereas ![{\prod_{i=1}^3 {\mathrm{Pr}}[X_i=1]=(1/2)^3}](https://s0.wp.com/latex.php?latex=%7B%5Cprod_%7Bi%3D1%7D%5E3+%7B%5Cmathrm%7BPr%7D%7D%5BX_i%3D1%5D%3D%281%2F2%29%5E3%7D&bg=ffffff&fg=000000&s=0&c=20201002) . But, by checking all cases, one can verify that they are pairwise independent.
. But, by checking all cases, one can verify that they are pairwise independent.
3.1. Constructing Pairwise Independent RVs
Let  be a finite field and
be a finite field and  . We will construct RVs
. We will construct RVs  such that each
such that each  is uniform over and the ‘s are pairwise independent. To do so, we need to generate only two independent RVs
is uniform over and the ‘s are pairwise independent. To do so, we need to generate only two independent RVs  and
and  that are uniformly distributed over . We then define
that are uniformly distributed over . We then define

Claim 9 Each is uniformly distributed on .
Proof: For  we have
we have  , which is uniform. For
, which is uniform. For  and any
and any  we have
we have
![\displaystyle \begin{array}{rcl} {\mathrm{Pr}}[ Y_i = j ] &=& {\mathrm{Pr}}[ X_1 + i \cdot X_2 = j ] \\ &=& {\mathrm{Pr}}[ X_2 = (j-X_1)/i ] \\ &=& \sum_{x \in {\mathbb F}} {\mathrm{Pr}}[~ X_2 = (j-x)/i ~\wedge~ X_1=x ~] \qquad(\mathrm{total~probability~law}) \\ &=& \sum_{x \in {\mathbb F}} {\mathrm{Pr}}[ X_2 = (j-x)/i] \cdot {\mathrm{Pr}}[ X_1=x ] \qquad(\mathrm{pairwise~independence}) \\ &=& (1/q) \cdot \sum_{x \in {\mathbb F}} {\mathrm{Pr}}[ X_2 = (j-x)/i ] \\ &=& (1/q), \end{array}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Barray%7D%7Brcl%7D+%7B%5Cmathrm%7BPr%7D%7D%5B+Y_i+%3D+j+%5D+%26%3D%26+%7B%5Cmathrm%7BPr%7D%7D%5B+X_1+%2B+i+%5Ccdot+X_2+%3D+j+%5D+%5C%5C+%26%3D%26+%7B%5Cmathrm%7BPr%7D%7D%5B+X_2+%3D+%28j-X_1%29%2Fi+%5D+%5C%5C+%26%3D%26+%5Csum_%7Bx+%5Cin+%7B%5Cmathbb+F%7D%7D+%7B%5Cmathrm%7BPr%7D%7D%5B%7E+X_2+%3D+%28j-x%29%2Fi+%7E%5Cwedge%7E+X_1%3Dx+%7E%5D+%5Cqquad%28%5Cmathrm%7Btotal%7Eprobability%7Elaw%7D%29+%5C%5C+%26%3D%26+%5Csum_%7Bx+%5Cin+%7B%5Cmathbb+F%7D%7D+%7B%5Cmathrm%7BPr%7D%7D%5B+X_2+%3D+%28j-x%29%2Fi%5D+%5Ccdot+%7B%5Cmathrm%7BPr%7D%7D%5B+X_1%3Dx+%5D+%5Cqquad%28%5Cmathrm%7Bpairwise%7Eindependence%7D%29+%5C%5C+%26%3D%26+%281%2Fq%29+%5Ccdot+%5Csum_%7Bx+%5Cin+%7B%5Cmathbb+F%7D%7D+%7B%5Cmathrm%7BPr%7D%7D%5B+X_2+%3D+%28j-x%29%2Fi+%5D+%5C%5C+%26%3D%26+%281%2Fq%29%2C+%5Cend%7Barray%7D+&bg=ffffff&fg=000000&s=0&c=20201002)
since as  ranges through ,
ranges through ,  also ranges through all of . (In other words, the map
also ranges through all of . (In other words, the map  is a bijection of to itself.) So is uniform.
is a bijection of to itself.) So is uniform.
Claim 10 The ‘s are pairwise independent.
Proof: We wish to show that, for any distinct RVs and  and any values
and any values  , we have
, we have
![\displaystyle {\mathrm{Pr}}[~ Y_i=a \:\wedge\: Y_j=b ~] ~=~ {\mathrm{Pr}}[ Y_i=a ] \cdot {\mathrm{Pr}}[ Y_j=b ] ~=~ 1/q^2.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5B%7E+Y_i%3Da+%5C%3A%5Cwedge%5C%3A+Y_j%3Db+%7E%5D+%7E%3D%7E+%7B%5Cmathrm%7BPr%7D%7D%5B+Y_i%3Da+%5D+%5Ccdot+%7B%5Cmathrm%7BPr%7D%7D%5B+Y_j%3Db+%5D+%7E%3D%7E+1%2Fq%5E2.+&bg=ffffff&fg=000000&s=0&c=20201002)
This event is equivalent to  and
and  . We can also rewrite that as:
. We can also rewrite that as:

This holds precisely when

Since and are independent and uniform over , this event holds with probability  .
.
Corollary 11 Given  mutually independent, uniformly random bits, we can construct
mutually independent, uniformly random bits, we can construct  pairwise independent, uniformly random strings in
pairwise independent, uniformly random strings in  .
.
Proof: Apply the previous construction to the finite field  . The mutually independent random bits are used to construct and . The random strings
. The mutually independent random bits are used to construct and . The random strings  are constructed as in (1).
are constructed as in (1).
3.2. Example: Max Cut with pairwise independent RVs
Once again let’s consider the Max Cut problem. We are given a graph  where
where  . We will choose
. We will choose  -valued random variables
-valued random variables  . If
. If  then we add vertex to
then we add vertex to  .
.
Our original algorithm chose to be mutually independent and uniform. Instead we will pick to be pairwise independent and uniform. Then
![\displaystyle \begin{array}{rcl} {\mathrm E}[ |\delta(U)| ] &=& \sum_{ij \in E} {\mathrm{Pr}}[~ (i \!\in\! U \wedge j \!\not\in\! U) \:\vee\: (i \!\not\in\! U \wedge j \!\in\! U) ~] \\ &=& \sum_{ij \in E} {\mathrm{Pr}}[~ i \!\in\! U \wedge j \!\not\in\! U ~] + {\mathrm{Pr}}[~ i \!\not\in\! U \wedge j \!\in\! U ~] \\ &=& \sum_{ij \in E} {\mathrm{Pr}}[Y_i]{\mathrm{Pr}}[\overline{Y_j}] + {\mathrm{Pr}}[\overline{Y_i}]{\mathrm{Pr}}[Y_j] \qquad(\mathrm{pairwise~independence}) \\ &=& \sum_{ij \in E} \Big( (1/2)^2 + (1/2)^2 \Big) \\ &=& |E|/2 \end{array}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Barray%7D%7Brcl%7D+%7B%5Cmathrm+E%7D%5B+%7C%5Cdelta%28U%29%7C+%5D+%26%3D%26+%5Csum_%7Bij+%5Cin+E%7D+%7B%5Cmathrm%7BPr%7D%7D%5B%7E+%28i+%5C%21%5Cin%5C%21+U+%5Cwedge+j+%5C%21%5Cnot%5Cin%5C%21+U%29+%5C%3A%5Cvee%5C%3A+%28i+%5C%21%5Cnot%5Cin%5C%21+U+%5Cwedge+j+%5C%21%5Cin%5C%21+U%29+%7E%5D+%5C%5C+%26%3D%26+%5Csum_%7Bij+%5Cin+E%7D+%7B%5Cmathrm%7BPr%7D%7D%5B%7E+i+%5C%21%5Cin%5C%21+U+%5Cwedge+j+%5C%21%5Cnot%5Cin%5C%21+U+%7E%5D+%2B+%7B%5Cmathrm%7BPr%7D%7D%5B%7E+i+%5C%21%5Cnot%5Cin%5C%21+U+%5Cwedge+j+%5C%21%5Cin%5C%21+U+%7E%5D+%5C%5C+%26%3D%26+%5Csum_%7Bij+%5Cin+E%7D+%7B%5Cmathrm%7BPr%7D%7D%5BY_i%5D%7B%5Cmathrm%7BPr%7D%7D%5B%5Coverline%7BY_j%7D%5D+%2B+%7B%5Cmathrm%7BPr%7D%7D%5B%5Coverline%7BY_i%7D%5D%7B%5Cmathrm%7BPr%7D%7D%5BY_j%5D+%5Cqquad%28%5Cmathrm%7Bpairwise%7Eindependence%7D%29+%5C%5C+%26%3D%26+%5Csum_%7Bij+%5Cin+E%7D+%5CBig%28+%281%2F2%29%5E2+%2B+%281%2F2%29%5E2+%5CBig%29+%5C%5C+%26%3D%26+%7CE%7C%2F2+%5Cend%7Barray%7D+&bg=ffffff&fg=000000&s=0&c=20201002)
So the original algorithm works just as well if we make pairwise independent decisions instead of mutually independent decisions for placing vertices in . The following theorem shows the advantage of making pairwise independent decisions.
Theorem 12 There is a deterministic, polynomial time algorithm to find a cut  with
with  .
.
Proof: By Corollary 11, we only need  mutually independent, uniform random bits
mutually independent, uniform random bits  in order to generate our pairwise independent, uniform random bits . We have just argued that these pairwise independent ‘s will give us
in order to generate our pairwise independent, uniform random bits . We have just argued that these pairwise independent ‘s will give us
![\displaystyle {\mathrm E}_{X_1,\ldots,X_b}[ |\delta(U)| ] ~=~ |E|/2.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm+E%7D_%7BX_1%2C%5Cldots%2CX_b%7D%5B+%7C%5Cdelta%28U%29%7C+%5D+%7E%3D%7E+%7CE%7C%2F2.+&bg=ffffff&fg=000000&s=0&c=20201002)
So there must exist some particular bits  such that fixing
such that fixing  for all , we get
for all , we get  . We can deterministically find such bits by exhaustive search in
. We can deterministically find such bits by exhaustive search in  trials. This gives a deterministic, polynomial time algorithm.
trials. This gives a deterministic, polynomial time algorithm.
4. Chebyshev with pairwise independent RVs
One of the main benefits of pairwise independent RVs is that Chebyshev’s inequality still works beautifully. Suppose that are pairwise independent. For any  ,
,
![\displaystyle {\mathrm{Cov}}[X_i,X_j] ~=~ {\mathrm E}[X_i X_j] - {\mathrm E}[X_i]{\mathrm E}[X_j] ~=~ 0,](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BCov%7D%7D%5BX_i%2CX_j%5D+%7E%3D%7E+%7B%5Cmathrm+E%7D%5BX_i+X_j%5D+-+%7B%5Cmathrm+E%7D%5BX_i%5D%7B%5Cmathrm+E%7D%5BX_j%5D+%7E%3D%7E+0%2C+&bg=ffffff&fg=000000&s=0&c=20201002)
by Claim 8. So
![\displaystyle {\mathrm{Var}}[{\textstyle \sum_{i=1}^n X_i}] ~=~ \sum_{i=1}^n {\mathrm{Var}}[X_i],](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BVar%7D%7D%5B%7B%5Ctextstyle+%5Csum_%7Bi%3D1%7D%5En+X_i%7D%5D+%7E%3D%7E+%5Csum_%7Bi%3D1%7D%5En+%7B%5Cmathrm%7BVar%7D%7D%5BX_i%5D%2C+&bg=ffffff&fg=000000&s=0&c=20201002)
by Claim 5. So
![\displaystyle {\mathrm{Pr}}[{\textstyle |\sum_i X_i - {\mathrm E}[\sum_i X_i]| > t }] ~\leq~ \frac{{\mathrm{Var}}[\sum_i X_i]}{t^2}.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5B%7B%5Ctextstyle+%7C%5Csum_i+X_i+-+%7B%5Cmathrm+E%7D%5B%5Csum_i+X_i%5D%7C+%3E+t+%7D%5D+%7E%5Cleq%7E+%5Cfrac%7B%7B%5Cmathrm%7BVar%7D%7D%5B%5Csum_i+X_i%5D%7D%7Bt%5E2%7D.+&bg=ffffff&fg=000000&s=0&c=20201002)
This is exactly the same bound that we would get if the ‘s were mutually independent.















.









![{{\mathrm E}[w(T_k)] \leq O(\log n) \cdot c(C^*)}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathrm+E%7D%5Bw%28T_k%29%5D+%5Cleq+O%28%5Clog+n%29+%5Ccdot+c%28C%5E%2A%29%7D&bg=ffffff&fg=000000&s=0&c=20201002)
![{\pi : [k] \rightarrow U}](https://s0.wp.com/latex.php?latex=%7B%5Cpi+%3A+%5Bk%5D+%5Crightarrow+U%7D&bg=ffffff&fg=000000&s=0&c=20201002)






![\displaystyle {\mathrm E}[\, w(T_k) \,] ~\leq~ {\mathrm E}\Big[\: \sum_{i=1}^k d_T(\pi_i,\pi_{i+1}) \:\Big] \\ ~\leq~ O(\log n) \cdot \sum_{i=1}^k d_G(\pi_i,\pi_{i+1}) \\ ~\leq~ O(\log n) \cdot c(C^*), \ \ \ \ \ (3)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm+E%7D%5B%5C%2C+w%28T_k%29+%5C%2C%5D+%7E%5Cleq%7E+%7B%5Cmathrm+E%7D%5CBig%5B%5C%3A+%5Csum_%7Bi%3D1%7D%5Ek+d_T%28%5Cpi_i%2C%5Cpi_%7Bi%2B1%7D%29+%5C%3A%5CBig%5D+%5C%5C+%7E%5Cleq%7E+O%28%5Clog+n%29+%5Ccdot+%5Csum_%7Bi%3D1%7D%5Ek+d_G%28%5Cpi_i%2C%5Cpi_%7Bi%2B1%7D%29+%5C%5C+%7E%5Cleq%7E+O%28%5Clog+n%29+%5Ccdot+c%28C%5E%2A%29%2C+%5C+%5C+%5C+%5C+%5C+%283%29&bg=ffffff&fg=000000&s=0&c=20201002)


![{{\mathrm E}[ d_T(\pi_i,\pi_{i+1}) ]}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathrm+E%7D%5B+d_T%28%5Cpi_i%2C%5Cpi_%7Bi%2B1%7D%29+%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002)

![{{\mathrm E}[w(T_k)]}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathrm+E%7D%5Bw%28T_k%29%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002)

be the closest vertex to
amongst
, using distances in
.
be a shortest path in
.

be the unique path in
.
.

 for all
for all 





![\displaystyle {\mathrm E}[ c(C_k) ] ~\leq~ O(\log n) \cdot c(C^*),](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm+E%7D%5B+c%28C_k%29+%5D+%7E%5Cleq%7E+O%28%5Clog+n%29+%5Ccdot+c%28C%5E%2A%29%2C+&bg=ffffff&fg=000000&s=0&c=20201002)
 be an edge and let
be an edge and let  be the corresponding tree. Is the shortest path metric of
be the corresponding tree. Is the shortest path metric of  and
and  , whereas the distance between
, whereas the distance between  . So, no matter which subtree
. So, no matter which subtree  (possibly with lengths on the edges) where
(possibly with lengths on the edges) where  and
and  is completely unrelated to
is completely unrelated to  . Can such a tree do a better job of approximating distances in
. Can such a tree do a better job of approximating distances in  . But here is a small observation: any subtree of
. But here is a small observation: any subtree of  , for both
, for both  . Let
. Let  be the distance between
be the distance between  at random and let
at random and let  be the
be the  since we constructed
since we constructed ![{{\mathrm E}[ d_T(u,v) ]}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathrm+E%7D%5B+d_T%28u%2Cv%29+%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) . If
. If  ; the probability of that happening is
; the probability of that happening is  . Otherwise,
. Otherwise,  . Thus,
. Thus,![\displaystyle {\mathrm E}[ d_T(u,v) ] ~=~ (d/n) \cdot (n-d) + (1-d/n) \cdot d ~\leq~ 2d.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm+E%7D%5B+d_T%28u%2Cv%29+%5D+%7E%3D%7E+%28d%2Fn%29+%5Ccdot+%28n-d%29+%2B+%281-d%2Fn%29+%5Ccdot+d+%7E%5Cleq%7E+2d.+&bg=ffffff&fg=000000&s=0&c=20201002)
 with
with  , there is an algorithm that generates a random tree for which all distances are approximated to within a factor of
, there is an algorithm that generates a random tree for which all distances are approximated to within a factor of  , a tree
, a tree  , and weights
, and weights  such that
such that 
![\displaystyle {\mathrm E}[ d_T\big(f(x),f(y)\big) ] ~\leq~ O(\log n) \cdot d_X(x,y) \quad\forall x,y \in X. \ \ \ \ \ (2)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm+E%7D%5B+d_T%5Cbig%28f%28x%29%2Cf%28y%29%5Cbig%29+%5D+%7E%5Cleq%7E+O%28%5Clog+n%29+%5Ccdot+d_X%28x%2Cy%29+%5Cquad%5Cforall+x%2Cy+%5Cin+X.+%5C+%5C+%5C+%5C+%5C+%282%29&bg=ffffff&fg=000000&s=0&c=20201002)
 such that such that
such that such that  for all distinct
for all distinct  . Note that
. Note that  -bounded random partition
-bounded random partition  of
of  then assemble those partitions into the desired tree. Assembling them is not too difficult, but there is one annoyance: the parts of
then assemble those partitions into the desired tree. Assembling them is not too difficult, but there is one annoyance: the parts of  for any
for any  . If the parts of
. If the parts of  then this would induce a natural hierarchy on the parts, and therefore give us a nice tree structure.
then this would induce a natural hierarchy on the parts, and therefore give us a nice tree structure. , for
, for  . In
. In 
 is the meet operation in the partition lattice. If you’re not familiar with this notation, don’t worry; it is easy to explain. Simply define
is the meet operation in the partition lattice. If you’re not familiar with this notation, don’t worry; it is easy to explain. Simply define  , then let
, then let
 , so we have obtained the desired hierarchical structure.
, so we have obtained the desired hierarchical structure. for the points
for the points  , and the corresponding partitions
, and the corresponding partitions  .
.

 : The vertices in
: The vertices in  where
where  and
and  . The vertices and edges of the tree
. The vertices and edges of the tree  as the root of the tree.
as the root of the tree. downto
downto  .
. , add the vertex
, add the vertex  to
to  , connected by an edge of length
, connected by an edge of length  .
.  for all distinct
for all distinct  and since
and since  is
is  . 1.5. Analysis
. 1.5. Analysis  . Let
. Let  be the largest index with
be the largest index with  . Then
. Then  .
.  is the highest level of the
is the highest level of the  are separated. A simple inductive argument shows that
are separated. A simple inductive argument shows that  and
and  is at level
is at level  . Let us call the least common ancestor
. Let us call the least common ancestor 
 , the proof is complete.
, the proof is complete.  . Since
. Since  . By Claim
. By Claim 
 . We have
. We have![\displaystyle \begin{array}{rcl} {\mathrm E}[\: d_T\big(f(x),f(y)\big) \:] &=& \sum_{i=0}^m {\mathrm{Pr}}[\: i \mathrm{~is~the~largest~index~with~} {\mathcal P}_i(x) \neq {\mathcal P}_i(y) \:] \cdot (2^{i+3} - 4) \\ &<& \sum_{i=0}^m {\mathrm{Pr}}[ {\mathcal P}_i(x) \neq {\mathcal P}_i(y) ] \cdot 2^{i+3} \\ &\leq& \sum_{i=0}^m {\mathrm{Pr}}[ B(x,r) \not\subseteq {\mathcal P}_i(x) ] \cdot 2^{i+3} \\ &\leq& O(\log n) \cdot r, \end{array}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Barray%7D%7Brcl%7D+%7B%5Cmathrm+E%7D%5B%5C%3A+d_T%5Cbig%28f%28x%29%2Cf%28y%29%5Cbig%29+%5C%3A%5D+%26%3D%26+%5Csum_%7Bi%3D0%7D%5Em+%7B%5Cmathrm%7BPr%7D%7D%5B%5C%3A+i+%5Cmathrm%7B%7Eis%7Ethe%7Elargest%7Eindex%7Ewith%7E%7D+%7B%5Cmathcal+P%7D_i%28x%29+%5Cneq+%7B%5Cmathcal+P%7D_i%28y%29+%5C%3A%5D+%5Ccdot+%282%5E%7Bi%2B3%7D+-+4%29+%5C%5C+%26%3C%26+%5Csum_%7Bi%3D0%7D%5Em+%7B%5Cmathrm%7BPr%7D%7D%5B+%7B%5Cmathcal+P%7D_i%28x%29+%5Cneq+%7B%5Cmathcal+P%7D_i%28y%29+%5D+%5Ccdot+2%5E%7Bi%2B3%7D+%5C%5C+%26%5Cleq%26+%5Csum_%7Bi%3D0%7D%5Em+%7B%5Cmathrm%7BPr%7D%7D%5B+B%28x%2Cr%29+%5Cnot%5Csubseteq+%7B%5Cmathcal+P%7D_i%28x%29+%5D+%5Ccdot+2%5E%7Bi%2B3%7D+%5C%5C+%26%5Cleq%26+O%28%5Clog+n%29+%5Ccdot+r%2C+%5Cend%7Barray%7D+&bg=ffffff&fg=000000&s=0&c=20201002)
 and
and  ,
,![\displaystyle \sum_{i=0}^m {\mathrm{Pr}}[ B(x,r) \not\subseteq {\mathcal P}_i(x) ] \cdot 2^{i+3} ~\leq~ O(\log n) \cdot r.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Csum_%7Bi%3D0%7D%5Em+%7B%5Cmathrm%7BPr%7D%7D%5B+B%28x%2Cr%29+%5Cnot%5Csubseteq+%7B%5Cmathcal+P%7D_i%28x%29+%5D+%5Ccdot+2%5E%7Bi%2B3%7D+%7E%5Cleq%7E+O%28%5Clog+n%29+%5Ccdot+r.+&bg=ffffff&fg=000000&s=0&c=20201002)
 . Then
. Then![\displaystyle \begin{array}{rcl} & & \sum_{i=0}^m {\mathrm{Pr}}[ B(x,r) \not\subseteq {\mathcal P}_i(x) ] \cdot 2^{i+3} \\ &\leq& \sum_{i=0}^{k+3} 2^{i+3} ~+~ \sum_{i=k+4}^m \frac{8r}{2^i} \cdot H\Big( |B(x,2^{i-2}-r)|, |B(x,2^{i-1}+r)| \Big) \cdot 2^{i+3} \\ &\leq& 128r ~+~ 64r \cdot \sum_{i=k+4}^m H\Big( |B(x,2^{i-3})|, |B(x,2^i)| \Big), \end{array}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Barray%7D%7Brcl%7D+%26+%26+%5Csum_%7Bi%3D0%7D%5Em+%7B%5Cmathrm%7BPr%7D%7D%5B+B%28x%2Cr%29+%5Cnot%5Csubseteq+%7B%5Cmathcal+P%7D_i%28x%29+%5D+%5Ccdot+2%5E%7Bi%2B3%7D+%5C%5C+%26%5Cleq%26+%5Csum_%7Bi%3D0%7D%5E%7Bk%2B3%7D+2%5E%7Bi%2B3%7D+%7E%2B%7E+%5Csum_%7Bi%3Dk%2B4%7D%5Em+%5Cfrac%7B8r%7D%7B2%5Ei%7D+%5Ccdot+H%5CBig%28+%7CB%28x%2C2%5E%7Bi-2%7D-r%29%7C%2C+%7CB%28x%2C2%5E%7Bi-1%7D%2Br%29%7C+%5CBig%29+%5Ccdot+2%5E%7Bi%2B3%7D+%5C%5C+%26%5Cleq%26+128r+%7E%2B%7E+64r+%5Ccdot+%5Csum_%7Bi%3Dk%2B4%7D%5Em+H%5CBig%28+%7CB%28x%2C2%5E%7Bi-3%7D%29%7C%2C+%7CB%28x%2C2%5Ei%29%7C+%5CBig%29%2C+%5Cend%7Barray%7D+&bg=ffffff&fg=000000&s=0&c=20201002)
 when
when  . The final sum is upper bounded as follows.
. The final sum is upper bounded as follows.
 . Let
. Let  be the ball of radius
be the ball of radius  around
around  , there is
, there is  -bounded random partition
-bounded random partition  of
of ![\displaystyle {\mathrm{Pr}}[ B(x,r) \not\subseteq {\mathcal P}(x) ] ~\leq~ \frac{ 8r }{ \Delta } \:\cdot\: H\big(\: |B(x,\Delta/4-r)|,\: |B(x,\Delta/2+r)| \:\big) \quad \forall x \in X ,\: \forall r>0. \ \ \ \ \ (1)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5B+B%28x%2Cr%29+%5Cnot%5Csubseteq+%7B%5Cmathcal+P%7D%28x%29+%5D+%7E%5Cleq%7E+%5Cfrac%7B+8r+%7D%7B+%5CDelta+%7D+%5C%3A%5Ccdot%5C%3A+H%5Cbig%28%5C%3A+%7CB%28x%2C%5CDelta%2F4-r%29%7C%2C%5C%3A+%7CB%28x%2C%5CDelta%2F2%2Br%29%7C+%5C%3A%5Cbig%29+%5Cquad+%5Cforall+x+%5Cin+X+%2C%5C%3A+%5Cforall+r%3E0.+%5C+%5C+%5C+%5C+%5C+%281%29&bg=ffffff&fg=000000&s=0&c=20201002)
![{\alpha \in (1/4,1/2]}](https://s0.wp.com/latex.php?latex=%7B%5Calpha+%5Cin+%281%2F4%2C1%2F2%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) uniformly at random.
uniformly at random. uniformly at random.
uniformly at random.
 .
. .We have already proven that this outputs a
.We have already proven that this outputs a  . For brevity let
. For brevity let  . Let us order all points of
. Let us order all points of  where
where  . The proof involves two important definitions.
. The proof involves two important definitions. if
if  .
. .
. and
and  is the Euclidean metric. Then
is the Euclidean metric. Then  intersects
intersects  .
. .
. .
. and
and  both see
both see  does not. The point
does not. The point 
 .
. iterations of the algorithm did not assign any point in
iterations of the algorithm did not assign any point in  do not see
do not see  . Consequently
. Consequently 
 . Thus
. Thus
 . Since
. Since  , we have shown that
, we have shown that
![\displaystyle {\mathrm{Pr}}[ B \not\subseteq {\mathcal P}(x) ] ~\leq~ {\mathrm{Pr}}[ y_{\pi(k)} \mathrm{~cuts~} B ] ~=~ \sum_{i=1}^n {\mathrm{Pr}}[ y_{\pi(k)}=y_i ~\wedge~ y_i \mathrm{~cuts~} B ].](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5B+B+%5Cnot%5Csubseteq+%7B%5Cmathcal+P%7D%28x%29+%5D+%7E%5Cleq%7E+%7B%5Cmathrm%7BPr%7D%7D%5B+y_%7B%5Cpi%28k%29%7D+%5Cmathrm%7B%7Ecuts%7E%7D+B+%5D+%7E%3D%7E+%5Csum_%7Bi%3D1%7D%5En+%7B%5Cmathrm%7BPr%7D%7D%5B+y_%7B%5Cpi%28k%29%7D%3Dy_i+%7E%5Cwedge%7E+y_i+%5Cmathrm%7B%7Ecuts%7E%7D+B+%5D.+&bg=ffffff&fg=000000&s=0&c=20201002)
 then
then  then
then  and
and  . Then we have shown that
. Then we have shown that![\displaystyle {\mathrm{Pr}}[ B \not\subseteq {\mathcal P}(x) ] ~\leq~ \sum_{i=a+1}^b {\mathrm{Pr}}[ y_{\pi(k)}=y_i ~\wedge~ y_i \mathrm{~cuts~} B ].](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5B+B+%5Cnot%5Csubseteq+%7B%5Cmathcal+P%7D%28x%29+%5D+%7E%5Cleq%7E+%5Csum_%7Bi%3Da%2B1%7D%5Eb+%7B%5Cmathrm%7BPr%7D%7D%5B+y_%7B%5Cpi%28k%29%7D%3Dy_i+%7E%5Cwedge%7E+y_i+%5Cmathrm%7B%7Ecuts%7E%7D+B+%5D.+&bg=ffffff&fg=000000&s=0&c=20201002)
 and
and  ” depends only on
” depends only on  ” depends primarily on
” depends primarily on ![\displaystyle {\mathrm{Pr}}[ B \not\subseteq {\mathcal P}(x) ] ~\leq~ \sum_{i=a+1}^b {\mathrm{Pr}}[ y_i \mathrm{~cuts~} B ] \cdot {\mathrm{Pr}}[\: y_{\pi(k)}=y_i \:|\: y_i \mathrm{~cuts~} B ]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5B+B+%5Cnot%5Csubseteq+%7B%5Cmathcal+P%7D%28x%29+%5D+%7E%5Cleq%7E+%5Csum_%7Bi%3Da%2B1%7D%5Eb+%7B%5Cmathrm%7BPr%7D%7D%5B+y_i+%5Cmathrm%7B%7Ecuts%7E%7D+B+%5D+%5Ccdot+%7B%5Cmathrm%7BPr%7D%7D%5B%5C%3A+y_%7B%5Cpi%28k%29%7D%3Dy_i+%5C%3A%7C%5C%3A+y_i+%5Cmathrm%7B%7Ecuts%7E%7D+B+%5D+&bg=ffffff&fg=000000&s=0&c=20201002)
![\displaystyle {\mathrm{Pr}}[ y_i \mathrm{~cuts~} B ] ~=~ {\mathrm{Pr}}[\: \alpha \Delta \in [d(x,y)-r,d(x,y)+r] \:] ~\leq~ \frac{2r}{\Delta/4},](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5B+y_i+%5Cmathrm%7B%7Ecuts%7E%7D+B+%5D+%7E%3D%7E+%7B%5Cmathrm%7BPr%7D%7D%5B%5C%3A+%5Calpha+%5CDelta+%5Cin+%5Bd%28x%2Cy%29-r%2Cd%28x%2Cy%29%2Br%5D+%5C%3A%5D+%7E%5Cleq%7E+%5Cfrac%7B2r%7D%7B%5CDelta%2F4%7D%2C+&bg=ffffff&fg=000000&s=0&c=20201002)
 is the length of the interval
is the length of the interval ![{[d(x,y)-r,d(x,y)+r]}](https://s0.wp.com/latex.php?latex=%7B%5Bd%28x%2Cy%29-r%2Cd%28x%2Cy%29%2Br%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) and
and  is the length of the interval from which
is the length of the interval from which  is randomly chosen.
is randomly chosen. cuts
cuts  . Every
. Every  coming earlier in the ordering has
coming earlier in the ordering has  , so
, so  .
.![\displaystyle {\mathrm{Pr}}[ B \not\subseteq {\mathcal P}(x) ] ~\leq~ \sum_{i=a+1}^b \frac{8r}{\Delta} \cdot \frac{1}{i} ~=~ \frac{8r}{\Delta} \cdot H(a,b),](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5B+B+%5Cnot%5Csubseteq+%7B%5Cmathcal+P%7D%28x%29+%5D+%7E%5Cleq%7E+%5Csum_%7Bi%3Da%2B1%7D%5Eb+%5Cfrac%7B8r%7D%7B%5CDelta%7D+%5Ccdot+%5Cfrac%7B1%7D%7Bi%7D+%7E%3D%7E+%5Cfrac%7B8r%7D%7B%5CDelta%7D+%5Ccdot+H%28a%2Cb%29%2C+&bg=ffffff&fg=000000&s=0&c=20201002)
 such that every metric has a
such that every metric has a  -bounded,
-bounded,  -Lipschitz random partition. We now show that this is optimal.
-Lipschitz random partition. We now show that this is optimal. .
.  and
and  :
: for all
for all  .
. ,
,  and
and  . (The constant
. (The constant  can of course be improved.)
can of course be improved.) that is
that is  -regular, the number of vertices in
-regular, the number of vertices in  . So every part
. So every part  . By the expansion condition, the number of edges cut is at least
. By the expansion condition, the number of edges cut is at least
 . Every point
. Every point  has
has  , so
, so  , implying that
, implying that  .
. . Every point
. Every point  , implying that
, implying that  .
.  , which is at least
, which is at least  . So
. So  , implying that
, implying that  , which is strictly less than
, which is strictly less than  . So
. So  such that
such that for all
for all  for all
for all  for
for  ).
). for all
for all  for all
for all  .
. .
. ) Metric:
) Metric:  and
and  .
. ) Metric:
) Metric:  .
. . The distance function is defined by letting
. The distance function is defined by letting  be the length of the shortest path between
be the length of the shortest path between  and keeping the same distance functions. In computer science we are often only interested in finite metric spaces because the input data to the problem is finite.
and keeping the same distance functions. In computer science we are often only interested in finite metric spaces because the input data to the problem is finite. be a partition of
be a partition of  be the unique part
be the unique part  . We say that the partition
. We say that the partition ![\displaystyle {\mathrm{Pr}}[ {\mathcal P}(x) \neq {\mathcal P}(y) ] ~\leq~ L \cdot d(x,y) \qquad \forall x,y \in X.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5B+%7B%5Cmathcal+P%7D%28x%29+%5Cneq+%7B%5Cmathcal+P%7D%28y%29+%5D+%7E%5Cleq%7E+L+%5Ccdot+d%28x%2Cy%29+%5Cqquad+%5Cforall+x%2Cy+%5Cin+X.+&bg=ffffff&fg=000000&s=0&c=20201002)
 ,
,  . The diameter of this metric is clearly
. The diameter of this metric is clearly  and
and  . This partition is
. This partition is  . Does it capture our goal that “close points should end up in the same part”?
. Does it capture our goal that “close points should end up in the same part”? and
and  , so most pairs of consecutive points did end up in the same part. But if we modify our metric slightly, this is no longer true. Consider making
, so most pairs of consecutive points did end up in the same part. But if we modify our metric slightly, this is no longer true. Consider making  uniformly at random, then set
uniformly at random, then set  and
and  . Let
. Let  (even if we made multiple copies of points). So
(even if we made multiple copies of points). So  .
. . They end up in different parts of the partition only if
. They end up in different parts of the partition only if  , which happens with probability at most
, which happens with probability at most  . Thus
. Thus ![{{\mathrm{Pr}}[ {\mathcal P}(i) \neq {\mathcal P}(i+1) ] \leq 3/n}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathrm%7BPr%7D%7D%5B+%7B%5Cmathcal+P%7D%28i%29+%5Cneq+%7B%5Cmathcal+P%7D%28i%2B1%29+%5D+%5Cleq+3%2Fn%7D&bg=ffffff&fg=000000&s=0&c=20201002) . More generally
. More generally![\displaystyle {\mathrm{Pr}}[ {\mathcal P}(x) \neq {\mathcal P}(y) ] ~\leq~ \frac{3}{n} \cdot d(x,y).](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5B+%7B%5Cmathcal+P%7D%28x%29+%5Cneq+%7B%5Cmathcal+P%7D%28y%29+%5D+%7E%5Cleq%7E+%5Cfrac%7B3%7D%7Bn%7D+%5Ccdot+d%28x%2Cy%29.+&bg=ffffff&fg=000000&s=0&c=20201002)
 . The key point is: this holds regardless of how many copies of the points we make. So this same random partition
. The key point is: this holds regardless of how many copies of the points we make. So this same random partition  . We can think of this as meaning that the probability of adjacent points ending up in different parts is roughly the inverse of the diameter of those parts. Our main theorem is that, by increasing
. We can think of this as meaning that the probability of adjacent points ending up in different parts is roughly the inverse of the diameter of those parts. Our main theorem is that, by increasing  .
.  .
.![\displaystyle {\mathrm{Pr}}[ B(x,r) \not\subseteq {\mathcal P}(x) ] ~\leq~ \frac{8r}{\Delta} \:\cdot\: H\big(\: |B(x,\Delta/4-r)|,\: |B(x,\Delta/2+r)| \:\big) \qquad \forall x \in X ,\: \forall r>0. \ \ \ \ \ (1)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5B+B%28x%2Cr%29+%5Cnot%5Csubseteq+%7B%5Cmathcal+P%7D%28x%29+%5D+%7E%5Cleq%7E+%5Cfrac%7B8r%7D%7B%5CDelta%7D+%5C%3A%5Ccdot%5C%3A+H%5Cbig%28%5C%3A+%7CB%28x%2C%5CDelta%2F4-r%29%7C%2C%5C%3A+%7CB%28x%2C%5CDelta%2F2%2Br%29%7C+%5C%3A%5Cbig%29+%5Cqquad+%5Cforall+x+%5Cin+X+%2C%5C%3A+%5Cforall+r%3E0.+%5C+%5C+%5C+%5C+%5C+%281%29&bg=ffffff&fg=000000&s=0&c=20201002)
 . Note that if
. Note that if  . Thus
. Thus![\displaystyle \begin{array}{rcl} {\mathrm{Pr}}[ {\mathcal P}(x) \neq {\mathcal P}(y) ] &\leq& (8r/\Delta) \cdot H\big(\: |B(x,\Delta/4-r)|,\: |B(x,\Delta/2+r)| \:\big) \\ &\leq& (8r/\Delta) \cdot H(0, n ) \\ &=& O(\log(n)/\Delta) \cdot d(x,y), \end{array}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Barray%7D%7Brcl%7D+%7B%5Cmathrm%7BPr%7D%7D%5B+%7B%5Cmathcal+P%7D%28x%29+%5Cneq+%7B%5Cmathcal+P%7D%28y%29+%5D+%26%5Cleq%26+%288r%2F%5CDelta%29+%5Ccdot+H%5Cbig%28%5C%3A+%7CB%28x%2C%5CDelta%2F4-r%29%7C%2C%5C%3A+%7CB%28x%2C%5CDelta%2F2%2Br%29%7C+%5C%3A%5Cbig%29+%5C%5C+%26%5Cleq%26+%288r%2F%5CDelta%29+%5Ccdot+H%280%2C+n+%29+%5C%5C+%26%3D%26+O%28%5Clog%28n%29%2F%5CDelta%29+%5Ccdot+d%28x%2Cy%29%2C+%5Cend%7Barray%7D+&bg=ffffff&fg=000000&s=0&c=20201002)
 .
.  with
with  , so the
, so the  is either contained in
is either contained in  , the diameter of
, the diameter of  .
. is not chopped into pieces by the partition. But the parts of the partition are themselves balls of radius at least
is not chopped into pieces by the partition. But the parts of the partition are themselves balls of radius at least  , we might be optimistic that the ball
, we might be optimistic that the ball  . The algorithm generates the following partition.
. The algorithm generates the following partition.
 , decide if it is either a linear function or far from a linear function. There is a property testing algorithm for this problem that uses only a constant number of queries. This algorithm is a key ingredient in proving the infamous
, decide if it is either a linear function or far from a linear function. There is a property testing algorithm for this problem that uses only a constant number of queries. This algorithm is a key ingredient in proving the infamous  be a list of
be a list of  numbers for the remaining list to be sorted”. In other words, we wish to distinguish the following two scenarios:
numbers for the remaining list to be sorted”. In other words, we wish to distinguish the following two scenarios: .
. .
. entries of the list.
entries of the list. . Consider the input
. Consider the input
 , which happens with low probability.
, which happens with low probability.
 uniformly at random.
uniformly at random. in the list using binary search.
in the list using binary search. with
with  . Let
. Let  , which implies that
, which implies that  by distinctness.
by distinctness. .
.  ,
,  and maximum degree
and maximum degree  .
. be an arbitrary bijection.
be an arbitrary bijection.
 .
. .
.  in time
in time  .
.  .
. .
.
 if
if  .
. and
and ![{\mu = {\mathrm E}[X]}](https://s0.wp.com/latex.php?latex=%7B%5Cmu+%3D+%7B%5Cmathrm+E%7D%5BX%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) . The actual number of edges in
. The actual number of edges in ![\displaystyle |M| ~=~ {\mathrm E}[X_i] m ~=~ {\textstyle \frac{m}{k} \mu}.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7CM%7C+%7E%3D%7E+%7B%5Cmathrm+E%7D%5BX_i%5D+m+%7E%3D%7E+%7B%5Ctextstyle+%5Cfrac%7Bm%7D%7Bk%7D+%5Cmu%7D.+&bg=ffffff&fg=000000&s=0&c=20201002)
 . Since
. Since  , Fact
, Fact ![{{\mathrm E}[X_i] \geq 1/d^2}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathrm+E%7D%5BX_i%5D+%5Cgeq+1%2Fd%5E2%7D&bg=ffffff&fg=000000&s=0&c=20201002) , which implies that
, which implies that  . Therefore
. Therefore![\displaystyle \begin{array}{rcl} {\textstyle {\mathrm{Pr}}\Big[~ (1-\epsilon) \frac{m}{k} \mu \leq \frac{m}{k} X \leq (1+\epsilon) \frac{m}{k} \mu ~\Big] } &=& {\mathrm{Pr}}\Big[~ (1-\epsilon) \mu \leq X \leq (1+\epsilon) \mu ~\Big] \\ &\geq& 1-2\exp(-\epsilon^2 \mu / 3) ~\geq~ 0.9, \end{array}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Barray%7D%7Brcl%7D+%7B%5Ctextstyle+%7B%5Cmathrm%7BPr%7D%7D%5CBig%5B%7E+%281-%5Cepsilon%29+%5Cfrac%7Bm%7D%7Bk%7D+%5Cmu+%5Cleq+%5Cfrac%7Bm%7D%7Bk%7D+X+%5Cleq+%281%2B%5Cepsilon%29+%5Cfrac%7Bm%7D%7Bk%7D+%5Cmu+%7E%5CBig%5D+%7D+%26%3D%26+%7B%5Cmathrm%7BPr%7D%7D%5CBig%5B%7E+%281-%5Cepsilon%29+%5Cmu+%5Cleq+X+%5Cleq+%281%2B%5Cepsilon%29+%5Cmu+%7E%5CBig%5D+%5C%5C+%26%5Cgeq%26+1-2%5Cexp%28-%5Cepsilon%5E2+%5Cmu+%2F+3%29+%7E%5Cgeq%7E+0.9%2C+%5Cend%7Barray%7D+&bg=ffffff&fg=000000&s=0&c=20201002)
![{r_e \in [0,1]}](https://s0.wp.com/latex.php?latex=%7Br_e+%5Cin+%5B0%2C1%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) with each edge
with each edge  . They are all distinct with probability
. They are all distinct with probability  sharing an endpoint with
sharing an endpoint with  , recursively test if
, recursively test if  is in the matching. If so, return “No”.
is in the matching. If so, return “No”. is equivalent to the greedy algorithm. The only question is: what is the running time of the oracle?
is equivalent to the greedy algorithm. The only question is: what is the running time of the oracle?
 reachable by a path of length
reachable by a path of length  values in decreasing order. The probability of that event is
values in decreasing order. The probability of that event is  . The number of edges reachable by a path of length
. The number of edges reachable by a path of length  . So the expected number of nodes explored is less than
. So the expected number of nodes explored is less than  . So the expected time required by an oracle call is
. So the expected time required by an oracle call is  .
. times, the expected total running time is
times, the expected total running time is  be a bipartite graph, where
be a bipartite graph, where  is the set of right-vertices, and
is the set of right-vertices, and  , let
, let
 -expander if
-expander if  ,
,  , every vertex in
, every vertex in 
 , there exists an
, there exists an  but it is interesting even in the case
but it is interesting even in the case  .
. , we randomly choose exactly
, we randomly choose exactly  . We need to show that
. We need to show that  . We do this in a very naive way. We simply consider every set
. We do this in a very naive way. We simply consider every set  with
with  and show that it is unlikely that
and show that it is unlikely that  . That probability is easy to analyze:
. That probability is easy to analyze:![\displaystyle {\mathrm{Pr}}[ \Gamma(S) \subseteq T ] ~=~ \Big( \frac{|T|}{m} \Big)^{|S|d}.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5B+%5CGamma%28S%29+%5Csubseteq+T+%5D+%7E%3D%7E+%5CBig%28+%5Cfrac%7B%7CT%7C%7D%7Bm%7D+%5CBig%29%5E%7B%7CS%7Cd%7D.+&bg=ffffff&fg=000000&s=0&c=20201002)
 . (In fact, we will simplify our notation by considering the negligibly harder case of
. (In fact, we will simplify our notation by considering the negligibly harder case of  .) As long as
.) As long as  is not contained in any such
is not contained in any such  and
and ![\displaystyle \begin{array}{rcl} {\mathrm{Pr}}[ G \mathrm{~is~not~a~} (n,m,d)-\mathrm{expander} ] &\leq& \sum_{\substack{S \subseteq L \\ |S| \leq n/2}} ~ \sum_{\substack{T \subseteq R \\ |T|=|S|}} {\mathrm{Pr}}[ \Gamma(S) \subseteq T ] \\ &\leq& \sum_{s \leq n/2} \binom{n}{s} \binom{m}{s} (s/m)^{sd} \\ &\leq& \sum_{s \leq n/2} \Big( \frac{ne}{s} \Big)^s \Big(\frac{me}{s}\Big)^s \Big(\frac{s}{m}\Big)^{sd} \\ &\leq& \sum_{s \leq n/2} \Bigg( \frac{ne}{m} \frac{me}{m} \frac{s^{d-2}}{m^{d-2}}\Bigg)^{s} \\ &\leq& \sum_{s \leq n/2} \Bigg( \frac{ne^2}{(7/8)n} \frac{(n/2)^{d-2}}{\big((7/8)n\big)^{d-2}}\Bigg)^{s} \\ &\leq& \sum_{s \leq n/2} \Bigg( \frac{8e^2}{7} (4/7)^{d-2} \Bigg)^{s} \\ &\leq& \sum_{s=1}^{\infty} \Bigg( 8.5 \cdot 0.58^{d-2} \Bigg)^{s}. \end{array}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Barray%7D%7Brcl%7D+%7B%5Cmathrm%7BPr%7D%7D%5B+G+%5Cmathrm%7B%7Eis%7Enot%7Ea%7E%7D+%28n%2Cm%2Cd%29-%5Cmathrm%7Bexpander%7D+%5D+%26%5Cleq%26+%5Csum_%7B%5Csubstack%7BS+%5Csubseteq+L+%5C%5C+%7CS%7C+%5Cleq+n%2F2%7D%7D+%7E+%5Csum_%7B%5Csubstack%7BT+%5Csubseteq+R+%5C%5C+%7CT%7C%3D%7CS%7C%7D%7D+%7B%5Cmathrm%7BPr%7D%7D%5B+%5CGamma%28S%29+%5Csubseteq+T+%5D+%5C%5C+%26%5Cleq%26+%5Csum_%7Bs+%5Cleq+n%2F2%7D+%5Cbinom%7Bn%7D%7Bs%7D+%5Cbinom%7Bm%7D%7Bs%7D+%28s%2Fm%29%5E%7Bsd%7D+%5C%5C+%26%5Cleq%26+%5Csum_%7Bs+%5Cleq+n%2F2%7D+%5CBig%28+%5Cfrac%7Bne%7D%7Bs%7D+%5CBig%29%5Es+%5CBig%28%5Cfrac%7Bme%7D%7Bs%7D%5CBig%29%5Es+%5CBig%28%5Cfrac%7Bs%7D%7Bm%7D%5CBig%29%5E%7Bsd%7D+%5C%5C+%26%5Cleq%26+%5Csum_%7Bs+%5Cleq+n%2F2%7D+%5CBigg%28+%5Cfrac%7Bne%7D%7Bm%7D+%5Cfrac%7Bme%7D%7Bm%7D+%5Cfrac%7Bs%5E%7Bd-2%7D%7D%7Bm%5E%7Bd-2%7D%7D%5CBigg%29%5E%7Bs%7D+%5C%5C+%26%5Cleq%26+%5Csum_%7Bs+%5Cleq+n%2F2%7D+%5CBigg%28+%5Cfrac%7Bne%5E2%7D%7B%287%2F8%29n%7D+%5Cfrac%7B%28n%2F2%29%5E%7Bd-2%7D%7D%7B%5Cbig%28%287%2F8%29n%5Cbig%29%5E%7Bd-2%7D%7D%5CBigg%29%5E%7Bs%7D+%5C%5C+%26%5Cleq%26+%5Csum_%7Bs+%5Cleq+n%2F2%7D+%5CBigg%28+%5Cfrac%7B8e%5E2%7D%7B7%7D+%284%2F7%29%5E%7Bd-2%7D+%5CBigg%29%5E%7Bs%7D+%5C%5C+%26%5Cleq%26+%5Csum_%7Bs%3D1%7D%5E%7B%5Cinfty%7D+%5CBigg%28+8.5+%5Ccdot+0.58%5E%7Bd-2%7D+%5CBigg%29%5E%7Bs%7D.+%5Cend%7Barray%7D+&bg=ffffff&fg=000000&s=0&c=20201002)
 , the base of the exponent is less than
, the base of the exponent is less than  , and so the infinite series adds up to less than
, and so the infinite series adds up to less than  .
. and
and  with
with  . The vertices in
. The vertices in  are called the inputs and the vertices in
are called the inputs and the vertices in  are called the outputs. The graph
are called the outputs. The graph  and every
and every  and
and  with
with  , there are
, there are  has to arrive at a particular
has to arrive at a particular  ; it is acceptable for it to arrive at an arbitrary
; it is acceptable for it to arrive at an arbitrary  but we do not care what that mapping is.
but we do not care what that mapping is. edges: simply add an edge between every vertex in
edges: simply add an edge between every vertex in  edges are necessary. His conjecture came from an attempt to prove a lower bound in circuit complexity. But a short while later he realized that his own conjecture was false:
edges are necessary. His conjecture came from an attempt to prove a lower bound in circuit complexity. But a short while later he realized that his own conjecture was false: edges.
edges.  be a
be a  -expander. For every set
-expander. For every set  , there is a matching in
, there is a matching in  covering
covering  such that
such that  for every
for every  has
has  . That condition holds by
. That condition holds by  and
and  with
with  .
. be the number of edges used in a superconcentrator on
be the number of edges used in a superconcentrator on  edges for each of the two expanders.
edges for each of the two expanders. edges for the smaller superconcentrator.
edges for the smaller superconcentrator. . For the base case, we can take
. For the base case, we can take  whenever
whenever  .
. . By Claim
. By Claim  be the other endpoints of that matching. Similarly, the second expander contains a matching covering
be the other endpoints of that matching. Similarly, the second expander contains a matching covering  be the other endpoints of that matching. Note that
be the other endpoints of that matching. Note that  . By induction, the smaller superconcentrator contains
. By induction, the smaller superconcentrator contains  and
and  . Combining those paths with the edges of the matchings gives the desired paths between
. Combining those paths with the edges of the matchings gives the desired paths between  . Claim
. Claim  vertices in
vertices in ![\displaystyle {\mathrm{Pr}}[\: \wedge_{i=1}^n \overline{{\mathcal E}_i} \:] ~=~ \prod_{i=1}^n {\mathrm{Pr}}[ \overline{{\mathcal E}_i} ] ~>~ 0](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5B%5C%3A+%5Cwedge_%7Bi%3D1%7D%5En+%5Coverline%7B%7B%5Cmathcal+E%7D_i%7D+%5C%3A%5D+%7E%3D%7E+%5Cprod_%7Bi%3D1%7D%5En+%7B%5Cmathrm%7BPr%7D%7D%5B+%5Coverline%7B%7B%5Cmathcal+E%7D_i%7D+%5D+%7E%3E%7E+0+&bg=ffffff&fg=000000&s=0&c=20201002)
![{{\mathrm{Pr}}[{\mathcal E}_i]<1}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathrm%7BPr%7D%7D%5B%7B%5Cmathcal+E%7D_i%5D%3C1%7D&bg=ffffff&fg=000000&s=0&c=20201002) for every
for every ![{{\mathrm{Pr}}[ \wedge_{i=1}^n \overline{{\mathcal E}_i} ] > 0}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathrm%7BPr%7D%7D%5B+%5Cwedge_%7Bi%3D1%7D%5En+%5Coverline%7B%7B%5Cmathcal+E%7D_i%7D+%5D+%3E+0%7D&bg=ffffff&fg=000000&s=0&c=20201002) when the
when the  ‘s are not mutually independent, but they can have some sort of limited dependencies.
‘s are not mutually independent, but they can have some sort of limited dependencies. does not depend on the events
does not depend on the events  if
if![\displaystyle {\mathrm{Pr}}[ {\mathcal E}_j ] ~=~ {\mathrm{Pr}}[\: {\mathcal E}_j \:|\: \wedge_{i \in I'} {\mathcal E}_i \:] \qquad \forall I' \subseteq I.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5B+%7B%5Cmathcal+E%7D_j+%5D+%7E%3D%7E+%7B%5Cmathrm%7BPr%7D%7D%5B%5C%3A+%7B%5Cmathcal+E%7D_j+%5C%3A%7C%5C%3A+%5Cwedge_%7Bi+%5Cin+I%27%7D+%7B%5Cmathcal+E%7D_i+%5C%3A%5D+%5Cqquad+%5Cforall+I%27+%5Csubseteq+I.+&bg=ffffff&fg=000000&s=0&c=20201002)
![{{\mathrm{Pr}}[{\mathcal E}_i] \leq p}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathrm%7BPr%7D%7D%5B%7B%5Cmathcal+E%7D_i%5D+%5Cleq+p%7D&bg=ffffff&fg=000000&s=0&c=20201002) for all
for all  other events. If
other events. If  then
then 
 clauses. Our next theorem says: the reason this formula is unsatisfiable is that we allowed each variable to appear in too many clauses.
clauses. Our next theorem says: the reason this formula is unsatisfiable is that we allowed each variable to appear in too many clauses. such that the following is true. Let
such that the following is true. Let  be a
be a  clauses. Then
clauses. Then  . By applying the full-blown LLL one can achieve
. By applying the full-blown LLL one can achieve  .
. other clauses. So each clause shares a variable with less than
other clauses. So each clause shares a variable with less than  other clauses.
other clauses.
 Fix(
Fix( sharing some variable with
sharing some variable with  )
) where
where  calls to
calls to  (including both the top-level and recursive calls) is at most
(including both the top-level and recursive calls) is at most  .
.  to provide all the randomness used in executing the algorithm.
to provide all the randomness used in executing the algorithm. bits suffice because there are only
bits suffice because there are only  bits suffice because the Debugger already knows what clause is currently being fixed, and that clause shares variables with only
bits suffice because the Debugger already knows what clause is currently being fixed, and that clause shares variables with only  bits.
bits. bits.
bits. bits for all the messages sent when Solve calls Fix.
bits for all the messages sent when Solve calls Fix. for all the messages sent in the
for all the messages sent in the  recursive calls.
recursive calls.
 bits. The next claim argues that this happens with probability at most
bits. The next claim argues that this happens with probability at most  bits is at most
bits is at most  . So, a random bit string has probability
. So, a random bit string has probability  of being encoded into
of being encoded into  such that
such that  there is a value in
there is a value in  given by
given by  . (The random variable
. (The random variable  satisfies the following important property
satisfies the following important property ![\displaystyle {\mathrm{Pr}}_{s \in S}[\: h_s(x)=\alpha \:\wedge\: h_s(y)=\beta \:] ~=~ \frac{1}{|T|^2} \qquad\forall x \neq y \in U, ~~ \forall \alpha, \beta \in T.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle++%7B%5Cmathrm%7BPr%7D%7D_%7Bs+%5Cin+S%7D%5B%5C%3A+h_s%28x%29%3D%5Calpha+%5C%3A%5Cwedge%5C%3A+h_s%28y%29%3D%5Cbeta+%5C%3A%5D+%7E%3D%7E+%5Cfrac%7B1%7D%7B%7CT%7C%5E2%7D+%5Cqquad%5Cforall+x+%5Cneq+y+%5Cin+U%2C+%7E%7E+%5Cforall+%5Calpha%2C+%5Cbeta+%5Cin+T.+&bg=ffffff&fg=000000&s=0&c=20201002)
 ,
,  and
and  . Sampling a function from this family requires
. Sampling a function from this family requires  ,
,  and
and  a power of two.
a power of two. bits and that any standard arithmetic operation involving
bits and that any standard arithmetic operation involving  as a “dictionary”, so that we can efficiently test whether any element
as a “dictionary”, so that we can efficiently test whether any element  belongs to
belongs to  . There are many well-known solutions to this problem. For example, a balanced binary tree allows us to store the dictionary in
. There are many well-known solutions to this problem. For example, a balanced binary tree allows us to store the dictionary in  words of space, while search operations take
words of space, while search operations take  time in the worst case. (Insertion and deletion of items also take
time in the worst case. (Insertion and deletion of items also take  and
and  from the hash family. Can we simply store each item
from the hash family. Can we simply store each item  in the table in location
in the table in location  ? This would certainly be very efficient, because finding
? This would certainly be very efficient, because finding  such that
such that  , meaning that
, meaning that  ,
, ![\displaystyle {\mathrm{Pr}}_{s \in S}[ h_s(x) = h_s(y) ] ~=~ \sum_{i \in T} {\mathrm{Pr}}_{s \in S}[\: h_s(x)=i \:\wedge\: h_s(y)=i \:] ~=~ \sum_{i \in T} \frac{1}{|T|^2} ~=~ \frac{1}{|T|}.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle++%7B%5Cmathrm%7BPr%7D%7D_%7Bs+%5Cin+S%7D%5B+h_s%28x%29+%3D+h_s%28y%29+%5D+%7E%3D%7E+%5Csum_%7Bi+%5Cin+T%7D+%7B%5Cmathrm%7BPr%7D%7D_%7Bs+%5Cin+S%7D%5B%5C%3A+h_s%28x%29%3Di+%5C%3A%5Cwedge%5C%3A+h_s%28y%29%3Di+%5C%3A%5D+%7E%3D%7E+%5Csum_%7Bi+%5Cin+T%7D+%5Cfrac%7B1%7D%7B%7CT%7C%5E2%7D+%7E%3D%7E+%5Cfrac%7B1%7D%7B%7CT%7C%7D.+&bg=ffffff&fg=000000&s=0&c=20201002)
![\displaystyle {\mathrm E}[\#~\mathrm{collisions}] ~=~ \sum_{\{x,y\} \subset N ,\: x \neq y} {\mathrm{Pr}}_{s \in S}[ h_s(x) = h_s(y) ] ~=~ \binom{|N|}{2} / |T|. \ \ \ \ \ (1)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+++%7B%5Cmathrm+E%7D%5B%5C%23%7E%5Cmathrm%7Bcollisions%7D%5D+%7E%3D%7E+%5Csum_%7B%5C%7Bx%2Cy%5C%7D+%5Csubset+N+%2C%5C%3A+x+%5Cneq+y%7D+%7B%5Cmathrm%7BPr%7D%7D_%7Bs+%5Cin+S%7D%5B+h_s%28x%29+%3D+h_s%28y%29+%5D+%7E%3D%7E+%5Cbinom%7B%7CN%7C%7D%7B2%7D+%2F+%7CT%7C.+%5C+%5C+%5C+%5C+%5C+%281%29&bg=ffffff&fg=000000&s=0&c=20201002)
 (rounded up to a power of two), so
(rounded up to a power of two), so ![\displaystyle {\mathrm E}[\#~\mathrm{collisions}] \leq 1/2 \qquad\implies\qquad {\mathrm{Pr}}[\mathrm{no~collisions}] \geq 1/2, \ \ \ \ \ (2)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+++%7B%5Cmathrm+E%7D%5B%5C%23%7E%5Cmathrm%7Bcollisions%7D%5D+%5Cleq+1%2F2+%5Cqquad%5Cimplies%5Cqquad+%7B%5Cmathrm%7BPr%7D%7D%5B%5Cmathrm%7Bno%7Ecollisions%7D%5D+%5Cgeq+1%2F2%2C+%5C+%5C+%5C+%5C+%5C+%282%29&bg=ffffff&fg=000000&s=0&c=20201002)
 space.
space. (rounded up to a power of two). This will typically result in some collisions, but the second-level hash tables are used to deal with those collisions. The top-level hash function is denoted
(rounded up to a power of two). This will typically result in some collisions, but the second-level hash tables are used to deal with those collisions. The top-level hash function is denoted  , and the elements of
, and the elements of ![\displaystyle {\mathrm E}[\#~\mathrm{collisions}] \leq |N|/2 \qquad\text{and}\qquad {\mathrm{Pr}}[\#~\mathrm{collisions} \leq |N|] \geq 1/2.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle++%7B%5Cmathrm+E%7D%5B%5C%23%7E%5Cmathrm%7Bcollisions%7D%5D+%5Cleq+%7CN%7C%2F2+%5Cqquad%5Ctext%7Band%7D%5Cqquad+%7B%5Cmathrm%7BPr%7D%7D%5B%5C%23%7E%5Cmathrm%7Bcollisions%7D+%5Cleq+%7CN%7C%5D+%5Cgeq+1%2F2.+&bg=ffffff&fg=000000&s=0&c=20201002)
 is at most
is at most  , let
, let 
 . For each
. For each  where
where  . With probability at least
. With probability at least  there will be no collisions of the hash function
there will be no collisions of the hash function  , as shown by
, as shown by  , the top-level bucket containing item
, the top-level bucket containing item  , which gives the location of
, which gives the location of  , by construction. The total size of the second-level tables is
, by construction. The total size of the second-level tables is 
![{[k]}](https://s0.wp.com/latex.php?latex=%7B%5Bk%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) denote
denote  . Suppose
. Suppose ![{f : [k] \rightarrow {\mathbb R}}](https://s0.wp.com/latex.php?latex=%7Bf+%3A+%5Bk%5D+%5Crightarrow+%7B%5Cmathbb+R%7D%7D&bg=ffffff&fg=000000&s=0&c=20201002) be any function and suppose
be any function and suppose ![{{\mathrm E}[ f(X) ] \leq \mu}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathrm+E%7D%5B+f%28X%29+%5D+%5Cleq+%5Cmu%7D&bg=ffffff&fg=000000&s=0&c=20201002) . How can we find an
. How can we find an  such that
such that  ? Well, the assumption
? Well, the assumption  time. The same idea can also be used to find an
time. The same idea can also be used to find an  .
.![{f : [k]^n \rightarrow {\mathbb R}}](https://s0.wp.com/latex.php?latex=%7Bf+%3A+%5Bk%5D%5En+%5Crightarrow+%7B%5Cmathbb+R%7D%7D&bg=ffffff&fg=000000&s=0&c=20201002) be any function and suppose
be any function and suppose ![{{\mathrm E}[ f(X_1,\ldots,X_n) ] \leq \mu}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathrm+E%7D%5B+f%28X_1%2C%5Cldots%2CX_n%29+%5D+%5Cleq+%5Cmu%7D&bg=ffffff&fg=000000&s=0&c=20201002) . How can we find a vector
. How can we find a vector ![{(x_1,\ldots,x_n) \in [k]^n}](https://s0.wp.com/latex.php?latex=%7B%28x_1%2C%5Cldots%2Cx_n%29+%5Cin+%5Bk%5D%5En%7D&bg=ffffff&fg=000000&s=0&c=20201002) with
with  ? Exhaustive search is again an option, but now it will take
? Exhaustive search is again an option, but now it will take  time, which might be too much.
time, which might be too much. we can efficiently evaluate
we can efficiently evaluate![\displaystyle {\mathrm E}_{X_{i+1},\ldots,X_n}[\: f(x_1,\ldots,x_i,X_{i+1},\ldots,X_n) \:].](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm+E%7D_%7BX_%7Bi%2B1%7D%2C%5Cldots%2CX_n%7D%5B%5C%3A+f%28x_1%2C%5Cldots%2Cx_i%2CX_%7Bi%2B1%7D%2C%5Cldots%2CX_n%29+%5C%3A%5D.+&bg=ffffff&fg=000000&s=0&c=20201002)
![{{\mathrm E}[~ f(X_1,\ldots,X_n) ~|~ X_1=x_1,\ldots,X_i=x_i ~]}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathrm+E%7D%5B%7E+f%28X_1%2C%5Cldots%2CX_n%29+%7E%7C%7E+X_1%3Dx_1%2C%5Cldots%2CX_i%3Dx_i+%7E%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) , which is a conditional expectation of
, which is a conditional expectation of  with
with  .
. .
.![{{\mathrm E}[\: f(x_1,\ldots,x_i,X_{i+1},\ldots,X_n) \:] \leq {\mathrm E}[\: f(x_1,\ldots,x_{i-1},X_i,\ldots,X_n) \:]}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathrm+E%7D%5B%5C%3A+f%28x_1%2C%5Cldots%2Cx_i%2CX_%7Bi%2B1%7D%2C%5Cldots%2CX_n%29+%5C%3A%5D+%5Cleq+%7B%5Cmathrm+E%7D%5B%5C%3A+f%28x_1%2C%5Cldots%2Cx_%7Bi-1%7D%2CX_i%2C%5Cldots%2CX_n%29+%5C%3A%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002)
![\displaystyle g(y) ~=~ {\mathrm E}_{X_{i+1},\ldots,X_n}[\: f(x_1,\ldots,x_{i-1},y,X_{i+1},\ldots,X_n) \:].](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+g%28y%29+%7E%3D%7E+%7B%5Cmathrm+E%7D_%7BX_%7Bi%2B1%7D%2C%5Cldots%2CX_n%7D%5B%5C%3A+f%28x_1%2C%5Cldots%2Cx_%7Bi-1%7D%2Cy%2CX_%7Bi%2B1%7D%2C%5Cldots%2CX_n%29+%5C%3A%5D.+&bg=ffffff&fg=000000&s=0&c=20201002)
![{g(x_i) \leq {\mathrm E}_{X_i}[ g(X_i) ]}](https://s0.wp.com/latex.php?latex=%7Bg%28x_i%29+%5Cleq+%7B%5Cmathrm+E%7D_%7BX_i%7D%5B+g%28X_i%29+%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) , so we can find such an
, so we can find such an  , the algorithm independently flips a fair coin to decide whether to put
, the algorithm independently flips a fair coin to decide whether to put  . We argued that
. We argued that ![{{\mathrm E}[|\delta(U)|] \geq |E|/2}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathrm+E%7D%5B%7C%5Cdelta%28U%29%7C%5D+%5Cgeq+%7CE%7C%2F2%7D&bg=ffffff&fg=000000&s=0&c=20201002) .
.
![{{\mathrm E}[ f(X_1,\ldots,X_n) ] = {\mathrm E}[ |\delta(U)| ] = |E|/2}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathrm+E%7D%5B+f%28X_1%2C%5Cldots%2CX_n%29+%5D+%3D+%7B%5Cmathrm+E%7D%5B+%7C%5Cdelta%28U%29%7C+%5D+%3D+%7CE%7C%2F2%7D&bg=ffffff&fg=000000&s=0&c=20201002) . We wish to deterministically find values
. We wish to deterministically find values  .
.![\displaystyle {\mathrm E}_{X_{i+1},\ldots,X_n}[\: f(x_1,\ldots,x_i,X_{i+1},\ldots,X_n) \:],](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm+E%7D_%7BX_%7Bi%2B1%7D%2C%5Cldots%2CX_n%7D%5B%5C%3A+f%28x_1%2C%5Cldots%2Cx_i%2CX_%7Bi%2B1%7D%2C%5Cldots%2CX_n%29+%5C%3A%5D%2C+&bg=ffffff&fg=000000&s=0&c=20201002)
 belong to
belong to  are placed in
are placed in ![{[0,1]}](https://s0.wp.com/latex.php?latex=%7B%5B0%2C1%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) . Define the function
. Define the function 
![\displaystyle {\mathrm E}[f(X_1,\ldots,X_n)] ~=~ {\mathrm{Pr}}[\textstyle \sum_i X_i \geq \alpha ],](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm+E%7D%5Bf%28X_1%2C%5Cldots%2CX_n%29%5D+%7E%3D%7E+%7B%5Cmathrm%7BPr%7D%7D%5B%5Ctextstyle+%5Csum_i+X_i+%5Cgeq+%5Calpha+%5D%2C+&bg=ffffff&fg=000000&s=0&c=20201002)
![\displaystyle {\mathrm E}_{X_{i+1},\ldots,X_n}[\: f(x_1,\ldots,x_i,X_{i+1},\ldots,X_n) \:] ~=~ {\mathrm{Pr}}[~ \textstyle \sum_i X_i \geq \alpha ~|~ X_1=x_1,\ldots,X_i=x_i ~].](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm+E%7D_%7BX_%7Bi%2B1%7D%2C%5Cldots%2CX_n%7D%5B%5C%3A+f%28x_1%2C%5Cldots%2Cx_i%2CX_%7Bi%2B1%7D%2C%5Cldots%2CX_n%29+%5C%3A%5D+%7E%3D%7E+%7B%5Cmathrm%7BPr%7D%7D%5B%7E+%5Ctextstyle+%5Csum_i+X_i+%5Cgeq+%5Calpha+%7E%7C%7E+X_1%3Dx_1%2C%5Cldots%2CX_i%3Dx_i+%7E%5D.+&bg=ffffff&fg=000000&s=0&c=20201002)
 ”, the function
”, the function  ,
, ![\displaystyle {\mathrm{Pr}}[~ \textstyle \sum_i X_i \geq \alpha ~] ~\leq~ {\mathrm E}\Big[ e^{-t \alpha} \prod_{j=1}^n e^{t X_j} \Big]. \ \ \ \ \ (1)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5B%7E+%5Ctextstyle+%5Csum_i+X_i+%5Cgeq+%5Calpha+%7E%5D+%7E%5Cleq%7E+%7B%5Cmathrm+E%7D%5CBig%5B+e%5E%7B-t+%5Calpha%7D+%5Cprod_%7Bj%3D1%7D%5En+e%5E%7Bt+X_j%7D+%5CBig%5D.+%5C+%5C+%5C+%5C+%5C+%281%29&bg=ffffff&fg=000000&s=0&c=20201002)

![\displaystyle \begin{array}{rcl} {\mathrm E}_{X_{i+1},\ldots,X_n}[\: f(x_1,\ldots,x_i,X_{i+1},\ldots,X_n) \:] &=& e^{-t \alpha} \cdot \prod_{j=1}^i e^{t x_j} ~\cdot~ {\mathrm E}_{X_{i+1},\ldots,X_n}\Bigg[\: \prod_{j=i+1}^n e^{t X_j} \:\Bigg] \\ &=& e^{-t \alpha} \cdot \prod_{j=1}^i e^{t x_j} ~\cdot~ \prod_{j=i+1}^n {\mathrm E}_{X_j}\big[\: e^{t X_j} \:\big]. \end{array}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Barray%7D%7Brcl%7D+%7B%5Cmathrm+E%7D_%7BX_%7Bi%2B1%7D%2C%5Cldots%2CX_n%7D%5B%5C%3A+f%28x_1%2C%5Cldots%2Cx_i%2CX_%7Bi%2B1%7D%2C%5Cldots%2CX_n%29+%5C%3A%5D+%26%3D%26+e%5E%7B-t+%5Calpha%7D+%5Ccdot+%5Cprod_%7Bj%3D1%7D%5Ei+e%5E%7Bt+x_j%7D+%7E%5Ccdot%7E+%7B%5Cmathrm+E%7D_%7BX_%7Bi%2B1%7D%2C%5Cldots%2CX_n%7D%5CBigg%5B%5C%3A+%5Cprod_%7Bj%3Di%2B1%7D%5En+e%5E%7Bt+X_j%7D+%5C%3A%5CBigg%5D+%5C%5C+%26%3D%26+e%5E%7B-t+%5Calpha%7D+%5Ccdot+%5Cprod_%7Bj%3D1%7D%5Ei+e%5E%7Bt+x_j%7D+%7E%5Ccdot%7E+%5Cprod_%7Bj%3Di%2B1%7D%5En+%7B%5Cmathrm+E%7D_%7BX_j%7D%5Cbig%5B%5C%3A+e%5E%7Bt+X_j%7D+%5C%3A%5Cbig%5D.+%5Cend%7Barray%7D+&bg=ffffff&fg=000000&s=0&c=20201002)
 (i.e., we know that
(i.e., we know that ![{{\mathrm{Pr}}[ X_j=1 ] = p_j}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathrm%7BPr%7D%7D%5B+X_j%3D1+%5D+%3D+p_j%7D&bg=ffffff&fg=000000&s=0&c=20201002) ).
). with
with  . Set
. Set ![{\mu = \sum_i {\mathrm E}[X_i]}](https://s0.wp.com/latex.php?latex=%7B%5Cmu+%3D+%5Csum_i+%7B%5Cmathrm+E%7D%5BX_i%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) ,
,  and
and  . We have
. We have![\displaystyle {\mathrm{Pr}}[ \textstyle \sum_i X_i > (1+\delta) \mu ] ~\leq~ {\mathrm E}[ f(X_1,\ldots,X_n) ] ~\leq~ \exp\Big( - \mu \big( (1+\delta) \ln(1+\delta) - \delta\big) \Big),](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5B+%5Ctextstyle+%5Csum_i+X_i+%3E+%281%2B%5Cdelta%29+%5Cmu+%5D+%7E%5Cleq%7E+%7B%5Cmathrm+E%7D%5B+f%28X_1%2C%5Cldots%2CX_n%29+%5D+%7E%5Cleq%7E+%5Cexp%5CBig%28+-+%5Cmu+%5Cbig%28+%281%2B%5Cdelta%29+%5Cln%281%2B%5Cdelta%29+-+%5Cdelta%5Cbig%29+%5CBig%29%2C+&bg=ffffff&fg=000000&s=0&c=20201002)
 and
and  . We now apply the same argument as in
. We now apply the same argument as in ![\displaystyle \begin{array}{rcl} {\mathrm{Pr}}[~ \textstyle \sum_i X_i \geq (1+\delta) \mu ~|~ X_1=x_1,\ldots,X_n=x_n ~] &\leq& {\mathrm E}\Big[ f(X_1,\ldots,X_n) ~|~ X_1=x_1,\ldots,X_n=x_n \Big] \\ &=& f(x_1,\ldots,x_n) ~<~ 1. \end{array}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Barray%7D%7Brcl%7D+%7B%5Cmathrm%7BPr%7D%7D%5B%7E+%5Ctextstyle+%5Csum_i+X_i+%5Cgeq+%281%2B%5Cdelta%29+%5Cmu+%7E%7C%7E+X_1%3Dx_1%2C%5Cldots%2CX_n%3Dx_n+%7E%5D+%26%5Cleq%26+%7B%5Cmathrm+E%7D%5CBig%5B+f%28X_1%2C%5Cldots%2CX_n%29+%7E%7C%7E+X_1%3Dx_1%2C%5Cldots%2CX_n%3Dx_n+%5CBig%5D+%5C%5C+%26%3D%26+f%28x_1%2C%5Cldots%2Cx_n%29+%7E%3C%7E+1.+%5Cend%7Barray%7D+&bg=ffffff&fg=000000&s=0&c=20201002)
 ”, there is no randomness remaining. The sum
”, there is no randomness remaining. The sum  is not a random variable; it is simply the number
is not a random variable; it is simply the number  . Since the event “
. Since the event “ ” has probability less than
” has probability less than  .
. . But the method is useful because we can apply it in more complicated scenarios that involve multiple Chernoff bounds.
. But the method is useful because we can apply it in more complicated scenarios that involve multiple Chernoff bounds. approximation to the congestion minimization problem. We now get a deterministic algorithm by the method of pessimistic estimators.
approximation to the congestion minimization problem. We now get a deterministic algorithm by the method of pessimistic estimators. with
with  of pairs of vertices. We want to find
of pairs of vertices. We want to find  –
– paths such that each arc
paths such that each arc  is contained in few paths. Let
is contained in few paths. Let  , we create a variable
, we create a variable  .
.
 with probability
with probability  . For every arc
. For every arc  be the indicator of the event “
be the indicator of the event “ ”. Then the congestion on arc
”. Then the congestion on arc  . We showed that
. We showed that ![{{\mathrm E}[ Y^a ] \leq C^*}](https://s0.wp.com/latex.php?latex=%7B%7B%5Cmathrm+E%7D%5B+Y%5Ea+%5D+%5Cleq+C%5E%2A%7D&bg=ffffff&fg=000000&s=0&c=20201002) . Let
. Let  . We applied Chernoff bounds to every arc and a union bound to show that
. We applied Chernoff bounds to every arc and a union bound to show that![\displaystyle {\mathrm{Pr}}[~ \mathrm{any} ~a~ \mathrm{has}~ Y^a > \alpha C^* ~] ~\leq~ \sum_{a \in A} {\mathrm{Pr}}[~ Y^a > \alpha C^* ~] ~\leq~ 1/n.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%7B%5Cmathrm%7BPr%7D%7D%5B%7E+%5Cmathrm%7Bany%7D+%7Ea%7E+%5Cmathrm%7Bhas%7D%7E+Y%5Ea+%3E+%5Calpha+C%5E%2A+%7E%5D+%7E%5Cleq%7E+%5Csum_%7Ba+%5Cin+A%7D+%7B%5Cmathrm%7BPr%7D%7D%5B%7E+Y%5Ea+%3E+%5Calpha+C%5E%2A+%7E%5D+%7E%5Cleq%7E+1%2Fn.+&bg=ffffff&fg=000000&s=0&c=20201002)
![\displaystyle \textstyle {\mathrm{Pr}}[~ \mathrm{any} ~a~ \mathrm{has}~ Y^a > \alpha C^* ~] ~\leq~ \sum_{a \in A} {\mathrm{Pr}}[~ Y^a > \alpha C^* ~] ~\leq~ {\mathrm E}[ f(P_1,\ldots,P_k) ] ~\leq~ 1/n.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Ctextstyle+%7B%5Cmathrm%7BPr%7D%7D%5B%7E+%5Cmathrm%7Bany%7D+%7Ea%7E+%5Cmathrm%7Bhas%7D%7E+Y%5Ea+%3E+%5Calpha+C%5E%2A+%7E%5D+%7E%5Cleq%7E+%5Csum_%7Ba+%5Cin+A%7D+%7B%5Cmathrm%7BPr%7D%7D%5B%7E+Y%5Ea+%3E+%5Calpha+C%5E%2A+%7E%5D+%7E%5Cleq%7E+%7B%5Cmathrm+E%7D%5B+f%28P_1%2C%5Cldots%2CP_k%29+%5D+%7E%5Cleq%7E+1%2Fn.+&bg=ffffff&fg=000000&s=0&c=20201002)
 for which
for which  . Thus,
. Thus,![\displaystyle \begin{array}{rcl} {\mathrm{Pr}}[~ \mathrm{any} ~a~ \mathrm{has}~ Y^a > \alpha C^* \:|\: P_1=p_1,\ldots,P_k=p_k ~] &\leq& {\mathrm E}[~ f(P_1,\ldots,P_k) \:|\: P_1=p_1,\ldots,P_k=p_k ~] \\ &=& f(p_1,\ldots,p_k) ~\leq~ 1/n. \end{array}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cbegin%7Barray%7D%7Brcl%7D+%7B%5Cmathrm%7BPr%7D%7D%5B%7E+%5Cmathrm%7Bany%7D+%7Ea%7E+%5Cmathrm%7Bhas%7D%7E+Y%5Ea+%3E+%5Calpha+C%5E%2A+%5C%3A%7C%5C%3A+P_1%3Dp_1%2C%5Cldots%2CP_k%3Dp_k+%7E%5D+%26%5Cleq%26+%7B%5Cmathrm+E%7D%5B%7E+f%28P_1%2C%5Cldots%2CP_k%29+%5C%3A%7C%5C%3A+P_1%3Dp_1%2C%5Cldots%2CP_k%3Dp_k+%7E%5D+%5C%5C+%26%3D%26+f%28p_1%2C%5Cldots%2Cp_k%29+%7E%5Cleq%7E+1%2Fn.+%5Cend%7Barray%7D+&bg=ffffff&fg=000000&s=0&c=20201002)
 ” must have probability
” must have probability  then every arc
then every arc  , as desired.
, as desired.